Bienvenidos al Escritorio de Enrique. Hoy quiero hablar sobre Topología. Como veréis, es una rama de las matemáticas algo abstracta pero muy apasionante. Antes de nada, si queréis descargaros en pdf el contenido de esta entrada podéis pinchar en este enlace post2.
Lo primero que hay que saber es qué es topología. Topos viene del griego y significa «lugar». De una manera informal, la topología es un tipo de geometría que se dedica a estudiar las propiedades que se conservan de los objetos a tratar (objetos matemáticos; entes expresados en forma de conjuntos) después de «deformarlos» de manera continua, sin importar tanto el tamaño y la forma que éstos tienen. Por «deformarlos de manera continua» me refiero a estirarlos, contraerlos… Sin romperlos, como si fuesen de plastilina. Claro está que muchos de los objetos de estudio de esta disciplina no pueden representarse como objetos de plastilina, es solo una idea intuitiva.
Tenemos una palabra clave en el párrafo anterior: continuidad. Si queremos saber qué es la topología, tenemos que saber qué quiere decir continuidad.
(Apartado para los más noveles) Una función, representada por es una correspondencia entre los objetos de y los de que «lleva» cada elemento de () a un único elemento de , al cual denotamos por . Observemos que esto no excluye que si , entonces . Si esto ocurre, entonces decimos que es inyectiva. Por otra parte, nuestra definición de función tampoco excluye que para todo elemento exista un elemento tal que . Si esto ocurre, decimos que es sobreyectiva. Si es a la vez inyectiva y biyectiva, entonces decimos que es biyectiva.
Comencemos estudiando la continuidad en (conjunto de los números reales). Sea . Una función diremos que es continua en si para cualquier , existe tal que si , entonces . No os asustéis, esto solo significa que para que una función sea continua en un punto tenemos que poder encontrar valores muy cercanos a ese punto para los cuales sus imágenes (los valores que toma la función en esos puntos) sean muy cercanas a la imagen del punto en cuestión.
En la imágen se muestra la función como la línea roja. c es nuestro y L es
representa el valor absoluto de un número real, y es siempre mayor o igual que 0. Se dice que una función es continua si lo es en todo punto del dominio (conjunto en el que están definidos los valores que toma la función) Esta misma definición se puede generalizar para cualquier espacio métrico, y es lo que vamos a hacer ahora.
(Apartado para los másnoveles) es el conjunto de puntos de la forma , donde . La distancia en el plano de dos puntos se suele medir con la fórmula .
La distancia entre dos puntos del plano es la hipotenusa del triángulo rectángulo formado por los dos puntos en cuestión y el punto o, equivalentemente,
Esta distancia suele conocerse con el nombre métrica usual, , esto es, , y satisface las siguientes propiedades:
.
Si
.
.
Notemos que en podemos definir muchas métricas, como por ejemplo , conocida como métrica del taxi, o . Estas mismas métricas sirven para observando que un punto de es de la forma .
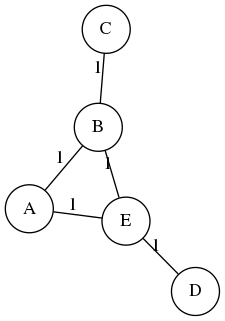
En general, dado un conjunto , decimos que una función es una métrica (o distancia) sobre si satisface los axiomas (1 – 5) anteriores (sustituyendo por y cada ). Si es una métrica sobre , entonces llamamos espacio métrico al par . Este tipo de espacios suponen una ventaja con respecto a trabajar con números reales, ya que nos abstraemos de ese espacio y podemos considerar espacios mucho más raros que puedan servirnos para algún propósito particular. Por poner un ejemplo tonto, supongamos que trabajo como vendedor de productos farmacéuticos en una ciudad A y me tengo que desplazar en avión a otras ciudades B, C, D y E, pero no todos los aviones que puedo coger me conectan de manera directa con la ciudad a la que quiero ir, sino que tengo que pasar por una ciudad intermedia desde la cual sí que puedo ir directamente hasta mi ciudad de destino. Este es un ejemplo de ciudades conectadas:
Las etiquetas de las aristas indican que entre las ciudades conectadas vamos a considerar que la distancia es 1, porque ese es el número mínimo de aviones que tenemos que coger para viajar entre esas ciudades
Nuestra métrica significa que la distancia entre dos ciudades es el mínimo número de aviones que tengo que tomar para ir de la primera a la segunda, y satisface los 5 axiomas anteriores, lo dejo como ejercicio para el lector (pista: realizar una demostración por casos). Así, por ejemplo, la distancia entre A y D es 2, pues primero tengo que ir de A a E y luego de E a D. Esta métrica nos puede resultar ventajosa si primamos el número de transbordos a realizar frente a la distancia «real» entre ciudades. Para concluir con el ejemplo, el conjunto sobre el que hemos definido la métrica es , y junto con la métrica, este sería nuestro espacio métrico.
Observemos que en un espacio métrico nuestra definición de función continua en un punto se puede dar de la siguiente manera: Dados dos espacios métricos , decimos que una función es continua en si para cada , existe tal que si , entonces .
En un espacio métrico podemos querer saber cuales son los elementos de que están a una distancia menor que una cierta cantidad de un punto concreto . Esto se suele llamar bola abierta de centro y radio , se denota por y se define matemáticamente como . Es una notación conjuntista. Las llaves representan un conjunto, la expresión que aparece antes de los dos puntos se lee, en este caso, «los puntos de , los dos puntos se leen «que satisfacen que» (otra de las notaciones que utilizan frecuentemente las matemáticas es | ), y lo que está detrás de los dos puntos se lee, en este caso «la distancia de a es menor que . Así, por ejemplo, en (con la métrica usual), la bola abierta de centro (0,0) y radio 1 es , es decir, son todos los puntos cuya distancia a (0, 0) es menor que 1. Recordando que es la ecuación de la circunferencia de centro (0, 0) y radio , concluimos que son todos los puntos del círculo de centro (0, 0) y radio 1 menos los de la circunferencia, lo que justifica el nombre de bola abierta.
Observemos que con otras métricas en el plano obtendríamos distintas bolas abiertas, que ya no tendrían la forma de «bolas». ¿Sabrías cómo definir función continua en un punto entre dos espacios métricos utilizando bolas abiertas?
Llegadas a este punto, estamos en condiciones suficientes de saber qué es un conjunto abierto. En un espacio métrico , un subconjunto de () es abierto si para cada punto , existe de forma que . En otras palabras, un conjunto es abierto si para cualquier punto del conjunto podemos meter una bola abierta (para puntos cercanos a la frontera tendría que ser muy pequeña). También existe el concepto de conjunto cerrado como conjunto cuyo complementario es abierto. No vamos a tratar los conjuntos cerrados, pero todos los conceptos que veamos para abiertos serían duales para cerrados. Hay que tener cuidado con decir que si un conjunto no es abierto, entonces es cerrado. Por ejemplo, en , el intervalo no es abierto ni cerrado. También puede suceder que un conjunto sea a la vez abierto y cerrado. Por ejemplo, es abierto y cerrado a la vez. Que es abierto es obvio. Y es cerrado porque su complementario es \ (conjunto vacío), y el conjunto vacío es abierto porque al no tener ningún punto, la condición de la definición de abierto «para cualquier punto del conjunto» se hace cierta siempre. Maravillas de la lógica. En otros espacios métricos más raros hay conjuntos que son a la vez abiertos y cerrados y no son ni el vacío ni el total.
Los conjuntos abiertos satisfacen tres propiedades que merecen ser destacadas:
y son abiertos y cerrados.
La intersección de dos conjuntos abiertos (y, por tanto, la intersección de una cantidad finita) es un conjunto abierto.
La unión de una colección arbitraria (finita o infinita) de conjuntos abiertos es abierta.
Estas propiedades pueden demostrarse, pero no es mi objetivo en este post.
Es momento de recordar nuestra motivación inicial: saber qué es la topología. Y la palabra clave es continuidad. Ya estamos en condiciones de saber qué es topología y poder desembarazarnos de la métrica para poder definir funciones continuas.
Dado un conjunto , un conjunto formado por subconjuntos de (¡es un conjunto formado por conjuntos!) es una topología para si satisface los siguientes axiomas:
y pertenecen a .
La intersección de dos elementos (conjuntos) de pertenece a .
La unión arbitraria de elementos de pertenece a .
De esta forma, se llama espacio topológico al par , y los elementos de se llaman abiertos. Esto no es nada raro, de hecho tiene mucho sentido viendo la analogía que hay entre las tres propiedades de los conjuntos abiertos en espacios métricos y los tres axiomas de la definición de topología.
Veamos algún ejemplo.
En definimos como el conjunto formado por todos los conjuntos abiertos de (estos conjuntos abiertos sabemos que lo son porque está equipado de manera natural con la métrica usual). Entonces, es trivialmente un espacio topológico, pues al satisfacer las tres propiedades de conjuntos abiertos cada uno de los elementos de la topología, satisfacen a su vez los tres axiomas requeridos para ser topología. A esta topología se le llama topología usual.
Si es un conjunto y consideramos (partes de ), que consiste en todos los conjuntos que son subconjuntos de , entonces es una topología sobre llamada topología discreta. Como ejercicio, comprueba que satisface los tres axiomas. Esta topología también proviene de una métrica, llamada métrica discreta, pero no voy a ahondar más en ello.
También hay topologías que no provienen de ninguna métrica. Por ejemplo, dado un conjunto , es una topología para llamada topología trivial. ¿Sabrías decir por qué no hay ninguna métrica que dé lugar a esta topología?
Como hemos dicho en el último ejemplo, hay espacios topológicos que no provienen de una métrica (a los que sí lo hacen se les llama espacios topológicos metrizables). Lejos de ser una pérdida, esto es una ventaja, pues podemos estudiar propiedades de espacios sin necesitar una «regla» con la que medir. Incluso podemos tener algo parecido a las bolas abiertas en espacios métricos. Las bolas abiertas, al tomar radios pequeños, nos muestran todos los puntos cercanos (a distancias menores que el radio) que hay alrededor de un punto (el centro de la bola). En topología tenemos los entornos. Dado un espacio topológico y un punto , llamamos entorno de a cualquier subconjunto tal que de forma que existe un abierto con . Es decir, un conjunto es entorno de un punto si contiene al punto y a un abierto que también contiene al punto. Por ejemplo, en , la bola abierta es entorno de , pues contiene al punto y, al ser las bolas abiertas conjuntos abiertos (es fácil comprobarlo utilizando las propiedades de conjuntos abiertos en espacios métricos teniendo en cuenta que dentro de una bola abierta podemos meter otra bola abierta), esta bola abierta contiene a . De hecho, por contener un conjunto a él mismo (sí, siempre se cumple que ), ya se ve que la bola inicial es un entorno. Es más, en un espacio topológico arbitrario, todos los abiertos (de la topología) son entornos de todos sus puntos.
Con todos estos ingredientes podemos dar ya la definición de función continua en un punto entre espacios topológicos. Dados dos espacios topológicos una función y un punto , decimos que la función es continua en si para cualquier entorno de existe un entorno de tal que (como es un conjunto, denota los valores de para todo punto de ; en notación matemática ). Revisemos esta definición con lo que ya sabíamos de continuidad en espacios métricos: dados dos espacios topológicos , una función y un punto , decimos que la función es continua en si para cualquier entorno de (para todo ) existe un entorno de (existe ) tal que (si , entonces ). Añadimos aquí que una función es continua si lo es en todo punto.
Ya hemos alcanzado nuestro objetivo, pero vamos a terminar viendo cómo comparar dos espacios topológicos. Es decir, tratar de discernir si dos espacios topológicos podemos, o no, distinguirlos topológicamente.
(Apartado para los más noveles) Dados dos conjuntos , y , se dice que la imagen inversa de por una función es . Observemos que no tiene por qué ser una función. En efecto, si no es inyectiva existen tales que , luego no es función, porque es y también . Sin embargo, si la función es inyectiva (o biyectiva, que ya supone inyectiva) entonces sí es función.
Dados dos espacios topológicos y una función , decimos que es homeomorfismo si es biyectiva y tanto como son continuas. En este caso, si existe un homeomorfismo entre dos espacios topológicos, se dice que éstos son homeomorfos. Además, se define propiedad topológica como una propiedad que se conserva mediante homeomorfismos, es decir, que si un espacio tiene tal propiedad, entonces la tienen todos sus espacios homeomorfos. Esto es especialmente útil a la hora de saber si dos espacios topológicos son o no «iguales» (esta es una palabra que en topología significa que dos espacios topológicos son homeomorfos y, por tanto, no se pueden distinguir), pues si tenemos dos espacios y uno de ellos tiene una propiedad topológica que no tiene el otro, podemos concluir que no son iguales (homeomorfos). Esto no quiere decir que si los dos tienen la propiedad vayan a ser iguales, pues puede haber otra propiedad que no la compartan.
Esto ha sido todo por hoy. Espero que os haya resultado tan interesante como me lo parece a mí. Si os habéis quedado con ganas de saber más sobre topología y queréis que profundice más u os apetece que trate algún otro tema, podéis dejármelo en los comentarios. ¡Hasta la próxima!
Soy matemático por la Universidad Complutense de Madrid especializado en Ciencias de la Computación, PDI en U-tad y estudiante PhD en Didáctica de las Matemáticas en la UCM. Miembro de Scenio. También divulgo en Twitter: @enrique_ferres
Lee todas las entradas de Enrique Ferres
Un comentario en “Una aproximación a la Topología”




















 y L es
y L es 







 o, equivalentemente,
o, equivalentemente, 


.
.
.






























![(0, 1]](https://s0.wp.com/latex.php?latex=%280%2C+1%5D&bg=ffffff&fg=1a1a1a&s=0&c=20201002)

y





































Un comentario en “Una aproximación a la Topología”